Challenging open problems
A promising way to manage these distributed systems is by utilising swarm intelligence. Swarming is an emergent collective intelligence behaviour, where simple entities self-organise based on local rules, to achieve a mutual objective. However designing fully distributed and autonomous systems remains a challenging open problem since the global systems' performance is hardly predictable based on individual behaviours, their mutual interactions and the interactions with the environment.
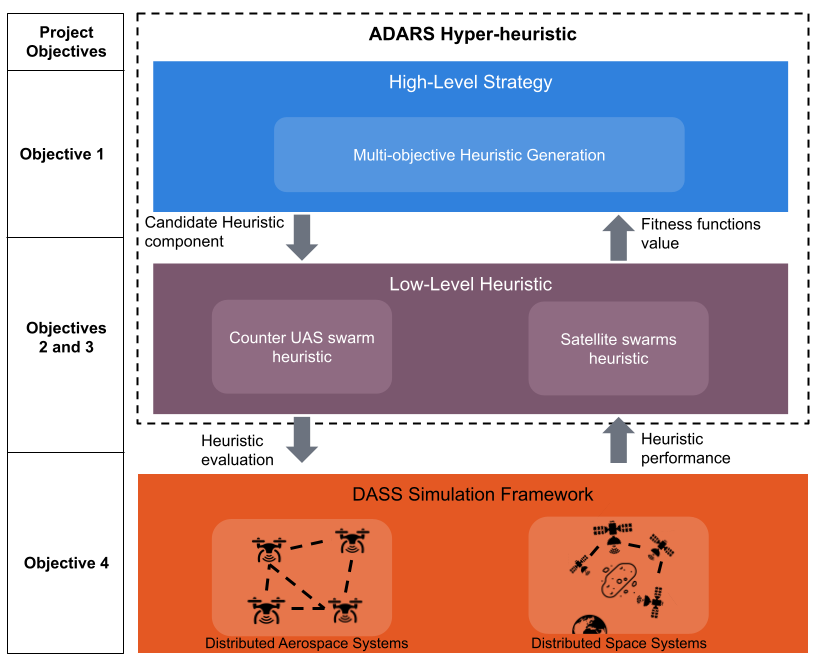
To achieve it's objectif to generate automatically design efficient and reusable multi-objective algorithms for swarms of distributed (aero)space systems, ADARS aims to solved these challeging open problems classified in four main categories.
Design of robots swarms
- Automated approach to robot swarm design.
- Generative approach which is not limited to searching into existing swarming heuristics.
- Generate less instance dependent heuristics (improves reusability).
- Use real-world tests with UAVs to evaluate if the generated heuristics cross the reality gap.
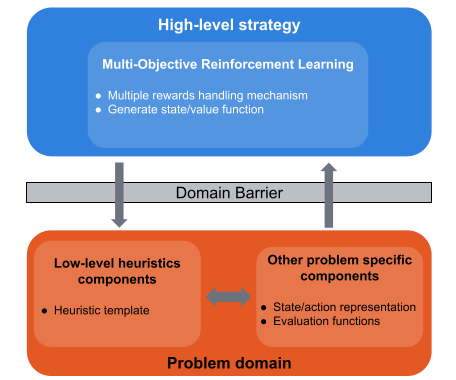
Automated algorithm design
- Novel multi-objective generative hyper-heuristic algorithms.
- Usage of a generative hyper-heuristic for the design of autonomous robot swarms.
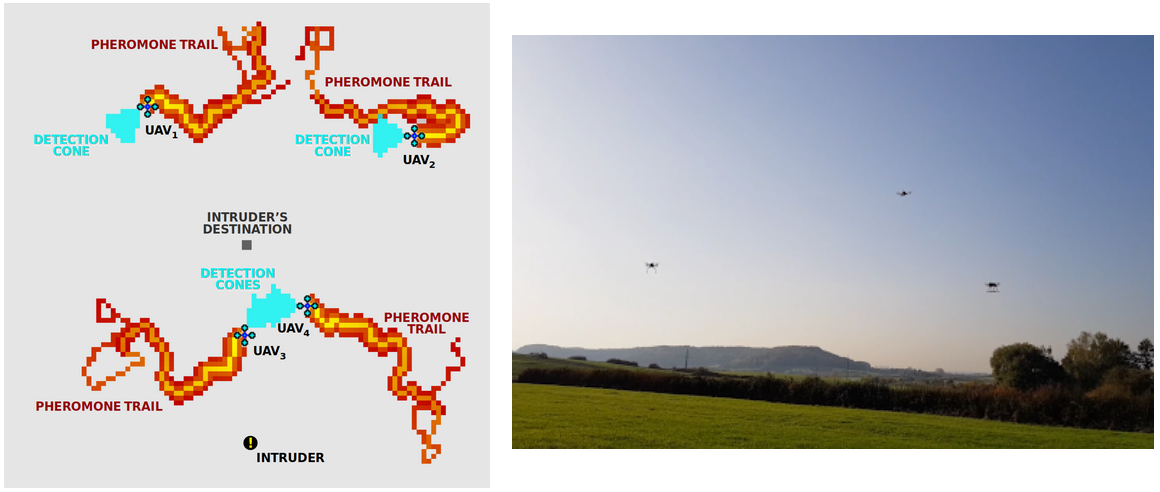
Counter UAV swarming system
- Unique rule-based swarm counter UAV system.
- Fully localized, distributed and scalable counter-measures against intruders.
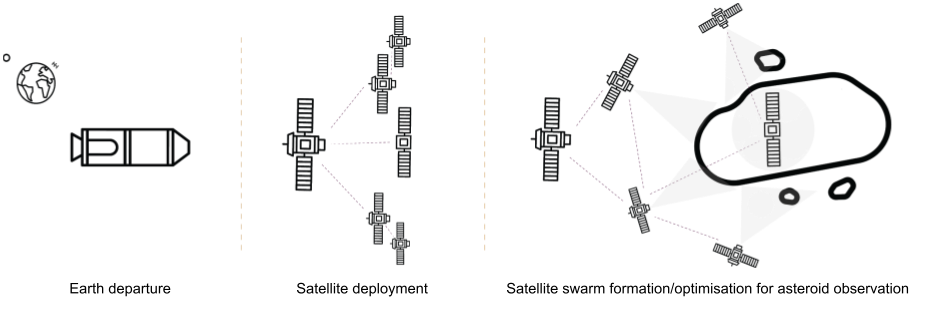
Satellite swarms for asteroid observation
- Unique rule-based satellite swarm for asteroid observation.
- Fully localized, distributed and scalable decision making.